OUTREACH
TAS
2015 and 2016
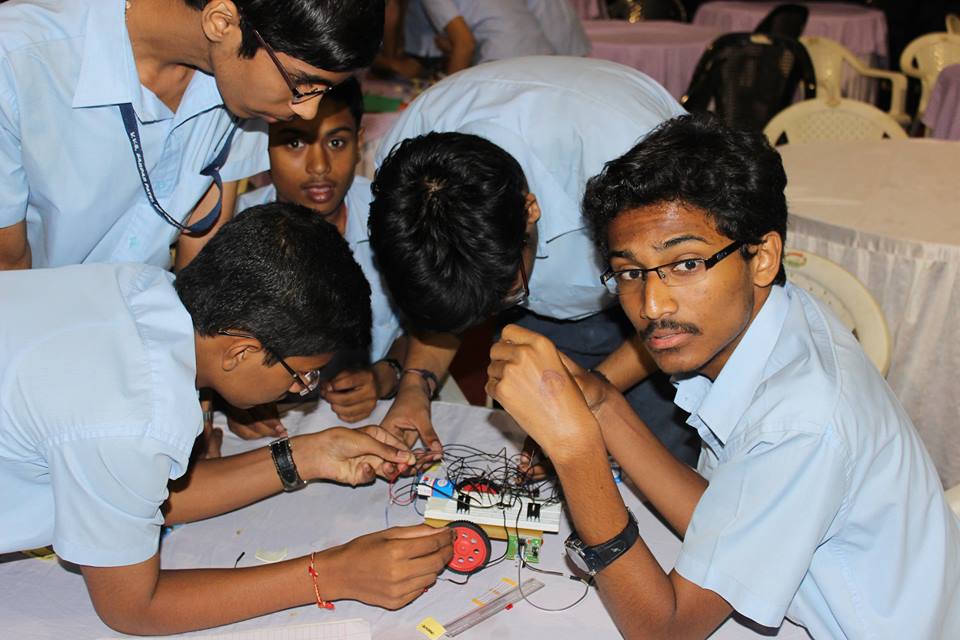
Amateur scientist (TAS), a annual event hosted by pes university. A niche platform for young minds to showcase their forte in various branches of science at a professional level(all small letters).Komponente has been a part of tas from the past 3 years in conducting hands-on electronics workshops(automatrix/songs of sensors).we take at most care in selecting the topic and executing them based on the age group of the participants.during TAS, we have received participants from class 5th to class 12th about 1500 students from various schools all around the country

Bootstrap
(2015 and 2016)
"The PESU Bootstrap program,organized by PESU in association with Komponente is a unique initiative to balance the academic focus and responsibility towards the community that shapes the character of the students, providing opportunities for the students to interact with skilled technicians and develop practical skills."
A three day marathon programme with an aim to give a new meaningful perspective to practical learning for the students.
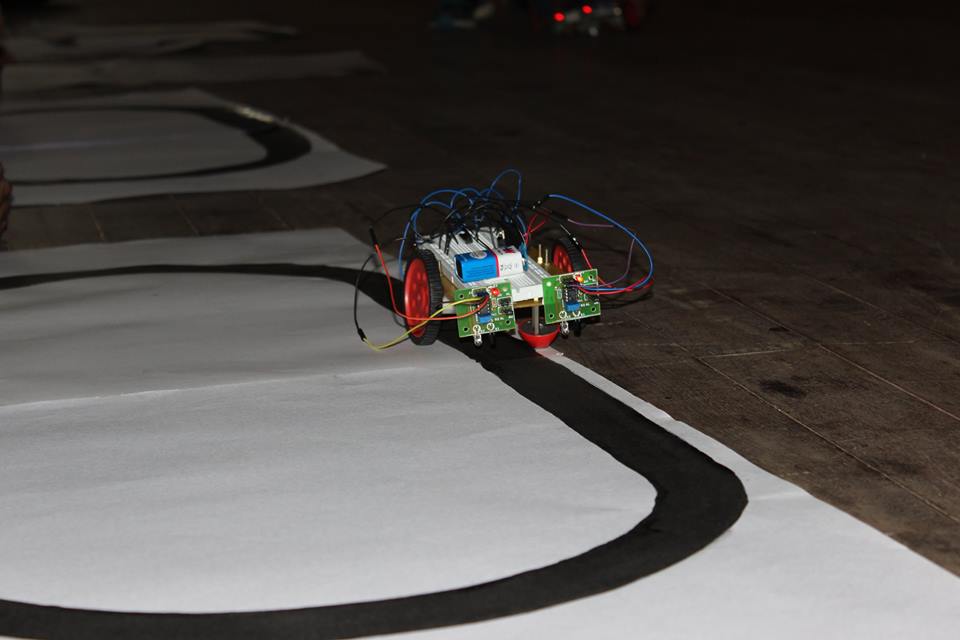
Amateur Scientist:"Building a line follower robot" Workshop
(23 August 2014)
A workshop on "building a line follower robot" as a part of "The Amateur Scientist" Program.Komponente was the official host for this workshop.

Komponente Funded Project
(August- November 2013)
The team of Namitha R. Krishna, Rashmi G.P and Sanchita Nayak received complete funding for their Project on a smart Obstacle Detecting Robot. The project was successfully completed.

Teach IEEE PESIT: Arduino
(11, 12, 13 September 2013)
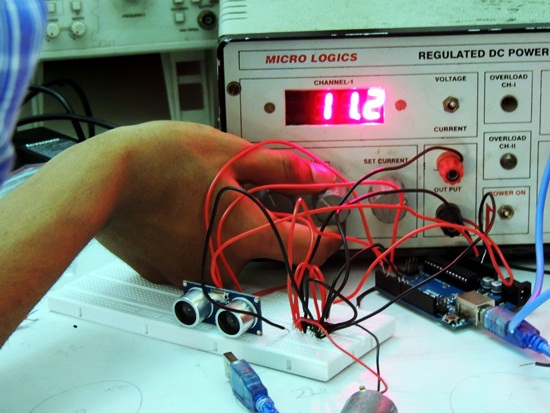
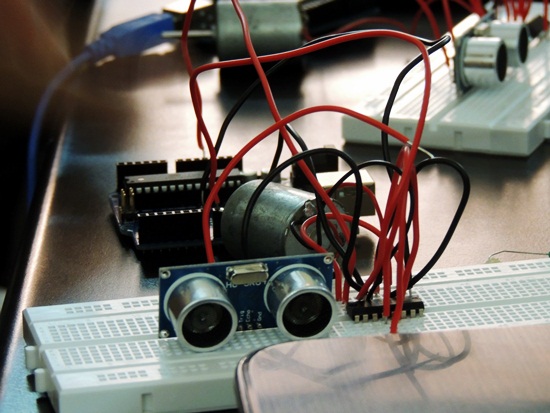
A 3 day workshop on Arduino, covering the basics of robotics, microcontrollers, sensors and actuators including hands on sessions. Komponente was the Official Components Provider for this Workshop



Komponente’s Workshop 1.0
(9, 10, 11 October 2013)
A 3 day workshop on introduction to robotics and embedded systems, architecture of Arduino and motor driver IC.Ultrasonic sensors, Arduino and DC motor were used for sensor interfacing and actuator control.